Listen to this content
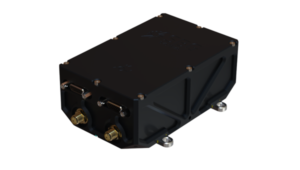
SBG Systems has unveiled its MEMS-based North-seeking inertial measurement unit (IMU) that operates independently of GNSS. According to the company, this launch lays the foundation for future products, such as attitude and heading reference systems (AHRS) and inertial navigation systems (INS), broadening the scope of MEMS-based navigation solutions.
The MEMS-based IMU can achieve a heading accuracy greater than 1° secant latitude without GNSS assistance. When integrated with GNSS and SBG Systems’ navigation algorithms, it can achieve INS heading accuracy greater than 0.01°.
The device features a true MEMS-based design with no moving parts, eliminating the need for carouseling mechanisms. This ensures enhanced durability and reliability across a wide range of operating environments.
Key features of this IMU include its compact size, low weight and minimal power consumption. Measuring 52 x 52 x 36 mm and weighing less than 150 g, it consumes only 2 watts of power. Designed for high-volume production, the device is well-suited for widespread adoption across industries. Additionally, its robust design offers long-term reliability in demanding conditions, and its ITAR-free status allows unrestricted global deployment.
SBG Systems has also developed new algorithms to enhance gyrocompass and INS alignment performance. These include a pure north-finding algorithm capable of rapid initialization in both static and dynamic conditions within one minute, as well as an advanced GNSS/INS fusion algorithm that delivers exceptional single-antenna heading accuracy even in low-dynamic environments.
It can be used for applications such as marine operations, autonomous systems and georeferencing. The IMU is particularly suited for subsea applications including remotely operated vehicles and autonomous underwater vehicles, as well as geospatial and marine surveying tasks requiring precise single-antenna heading accuracy.
The first off-the-shelf solutions are expected to be available by early 2026.