New LUNA sensor enables navigation in the Moon’s dark

 Intuitive Machines' IM-4 will deliver science and technology to the Moon, and return valuable data while autonomously operating on the lunar surface.. (Image: NASA)
Intuitive Machines' IM-4 will deliver science and technology to the Moon, and return valuable data while autonomously operating on the lunar surface.. (Image: NASA) Global navigation company Advanced Navigation has successfully completed critical terrestrial validation for its LUNA (Laser measurement Unit for Navigational Aid) sensor, designed for navigating on the Moon.
During a series of punishing, Moon-like trials on Earth, the LUNA sensor proved its core functionality, and exceeded the demanding performance requirements set by its commercial lunar surface delivery provider, Intuitive Machines, for its upcoming IM-4 mission, which includes NASA payloads. This achievement clears the path for LUNA to enter the final stage of space qualification.
“For decades, landing on the Moon has meant flying with only partial vision in the final kilometers,” said Chris Shaw, CEO and co-founder of Advanced Navigation. “With no GPS to guide them, landers depend on a combination of sensors that can introduce drift or deliver incomplete data — turning every descent into a high-stakes calculation where a single error could mean mission failure.”
Navigating Extreme Darkness
The LUNA sensor aims to give lunar landers and rovers hyper-accurate “laser vision” to see their own speed and position in the darkness of space, potentially making crashes a thing of the past and paving the way for safe, autonomous exploration.
The lunar South Pole is marked by deep, permanently shadowed craters that never receive direct sunlight, creating extreme darkness. Intuitive Machines’ IM-4 Nova-C class lander is scheduled to land there in 2027 under NASA’s Commercial Lunar Payload Services (CLPS) initiative, including Advanced Navigation’s LUNA sensor. Demonstrated performance has given the mission a high degree of confidence moving forward.
Landing on the Moon remains a formidable challenge — there is no atmosphere or GPS, lighting is unpredictable, and the terrain is riddled with craters. To navigate these obstacles, spacecraft must possess extraordinary situational awareness and leverage advanced navigation technologies.
LUNA provides “laser light vision” to eliminate this gamble. It uses laser beams to deliver a constant, live feed of the lander’s true 3D velocity and altitude relative to the lunar surface. This stream of precise data acts as a real-time correction, turning a high-stakes partially blind descent into a controlled, accurate landing — a necessary step for enabling true autonomy on the Moon.
The sensor design defies conventional trade-offs, packing order-of-magnitude performance gains in a remarkably small and efficient form factor. Weighing just 2.8kg and approximately 8 times smaller in volume than alternative solutions, LUNA is designed for seamless integration into the Nova-C lander. Its performance replaces multiple legacy sensors, drastically reducing the overall mass, complexity, and cost of a mission. This consolidation represents a cost-saving of several million dollars for a typical lunar lander.
Tim Crain, Chief Technology Officer, Intuitive Machines, said, “Advanced Navigation’s lightweight, high-performance sensor aligns with our strategy to reduce mass while increasing capability – and it complements our precision landing technology by adding critical velocity and altitude data during descent. This TRL9 maturity of these technologies represents a significant advance for the Australian space industry at large.”
Proven on Earth’s Harshest Terrains
This pivotal validation was achieved through a rigorous testing campaign that pushed LUNA to its limits in the world’s most extreme, Moon-like environments, where traditional GPS and external signals are absent.
High above the desert. To simulate the high-dynamics of the final 5km lunar descent, a LUNA sensor was flown on a light aircraft over the sandy terrain of Western Australia’s Pinnacles Desert, which served as a proxy for lunar regolith. In these GPS-denied flights, the system demonstrated a mere 28m of error after 100km of flight. Published technical paper.
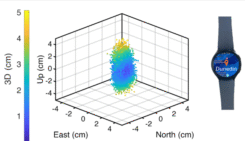
Deep below the ground. Trials were conducted in Europe’s deepest mine in Finland to simulate surface rover navigation (see the October issue of GPS World). The harsh, dark, dusty and GPS-denied conditions served as a direct analogue for a rover navigating shadowed Moon craters. Across a 6 km stretch 400 m below ground surface, LUNA achieved a best-case 3D position error of just 0.55m (0.009%) and an average error of 2.83m (0.047%). To put it into perspective, standard GPS typically delivers 2-10m of accuracy in open-sky conditions; LUNA surpassed this in an underground labyrinth. Research paper.
The results of these field tests demonstrate Advanced Navigation’s technology can achieve surgical precision in places where no external signals or prior information of the environment exist — an essential capability for lunar missions, where every centimeter counts.
The following video explains why craters at the Moon’s poles remain dark.



About the Author: Tracy Cozzens
Tracy Cozzens has been with GPS World magazine in varying capacities since 2006, wearing many hats during her tenure. She has worked in government, for non-profits, and in corporate communications, editing a variety of publications for audiences ranging from federal government contractors to teachers.


Subscribe to GPS World
If you enjoyed this article, subscribe to GPS World to receive more articles just like it.







Follow Us