Listen to this content
One of the most persistent sources of GNSS error — ionospheric delay — has been challenging to correct in real time, especially for mass-market devices. While dual-frequency receivers and commercial correction services can mostly mitigate this issue, they remain too costly and impractical for the billions of smartphones and IoT devices that rely on single-frequency GNSS. Even for dual-frequency systems, the commonly used ionosphere-free linear combination amplifies multipath and receiver errors and reduces data redundancy — yielding only two usable combinations from four original measurements.
This landscape may be shifting with the introduction of GloTEC, a real-time global Total Electron Content (TEC) map from NOAA’s Space Weather Prediction Center (SWPC), released in February 2025. GloTEC assimilates both ground- and space-based observations to provide real-time global ionospheric corrections without relying on error-prone linear combinations.
Unlike coarse models such as the broadcast Klobuchar algorithm or forecast-only products such as the predicted IGS Global Ionosphere Maps, GloTEC updates every 10 minutes using real-time measurements. This high refresh rate establishes a new benchmark for open-access ionospheric nowcasting in GNSS applications.
Originally designed to monitor and mitigate space weather impacts on aviation and communications, GloTEC may also deliver a broader benefit: enabling precise, scalable GNSS corrections for low-cost, single-frequency devices, making high-accuracy positioning more accessible and democratic.
Why Nowcasting Matters for GNSS
The GNSS community has long had to choose between accuracy and latency. Predictive models, such as those from NASA CEDIS or CODETEC, can offer reasonable approximations but may fall short when real-time corrections are required, particularly in the context of navigation, asset tracking or autonomous systems.
Post-processed products (such as rapid/final IGS GIMs) provide excellent fidelity but are typically delayed by hours, days, or even weeks. This makes them useful for research or auditing, but not for real-time navigation needs.
Commercial correction services, such as Trimble RTX and Hexagon’s TerraStar, have filled the gap for high-value applications. These systems interpolate ionospheric corrections in real time, but at a significant cost and they typically require specialized GNSS receivers.
GloTEC bridges this gap by delivering a publicly accessible, high-refresh ionospheric product that can support near real-time corrections. Updated every 10 minutes with a 2.5° latitude and 5° longitude spatial resolution, GloTEC represents a major step forward for public sector GNSS capability, particularly in contexts where accuracy, reliability and scale are all crucial. The data has also been supporting the United States Space Force and is accessible through their Unified Data Library (UDL).
Technical Approach: Adapting GloTEC for Practical Use
While the potential of GloTEC is exciting, turning it into usable corrections for consumer-grade devices isn’t straightforward. TEC maps represent volumetric electron density, while most mass-market GNSS chipsets, especially in smartphones, expect simplified models, such as the eight-parameter Klobuchar model broadcast by GPS satellites. GloTEC is a three-dimensional data assimilation system that uses a Gauss-Markov Kalman Filter to estimate electron density in the ionosphere. It ingests slant TEC measurements from ground-based GNSS receivers and space-based radio occultation data, using the IRI-2016 model as its background state.
To bridge this mismatch, Zephr’s team has been exploring regional fitting techniques, whereby a local subset of GloTEC data is used to generate custom Klobuchar coefficients. These can be transmitted to devices via standardized protocols, such as the LTE Positioning Protocol (LPP), enabling improved ionospheric delay estimation with minimal changes to device-side computation. Even with a regionalized Klobuchar fit and LPP encoding, there is still the problem of accessing the GNSS chip to apply the corrections. To solve this problem, Zephr has created a virtualized positioning engine that takes the raw GNSS measurements from the chip and provides a purely software-based solver. This approach allows the team to implement a variety of more advanced positioning techniques using commodity hardware such as smartphones.
Field Testing: A Quantitative Step Forward
To evaluate the efficacy of GloTEC in improving GNSS accuracy, engineers at Zephr used the virtualized positioning engine to conduct 51 real-world campaigns across various conditions – including urban, suburban, static, walking, and driving – using a Pixel 8 smartphone and an RTK unit for ground truth.
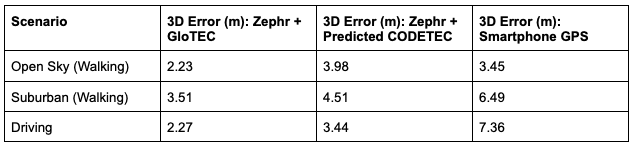
The results were promising, as shown in Figure 1:
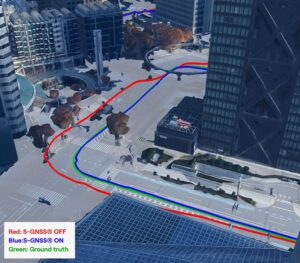
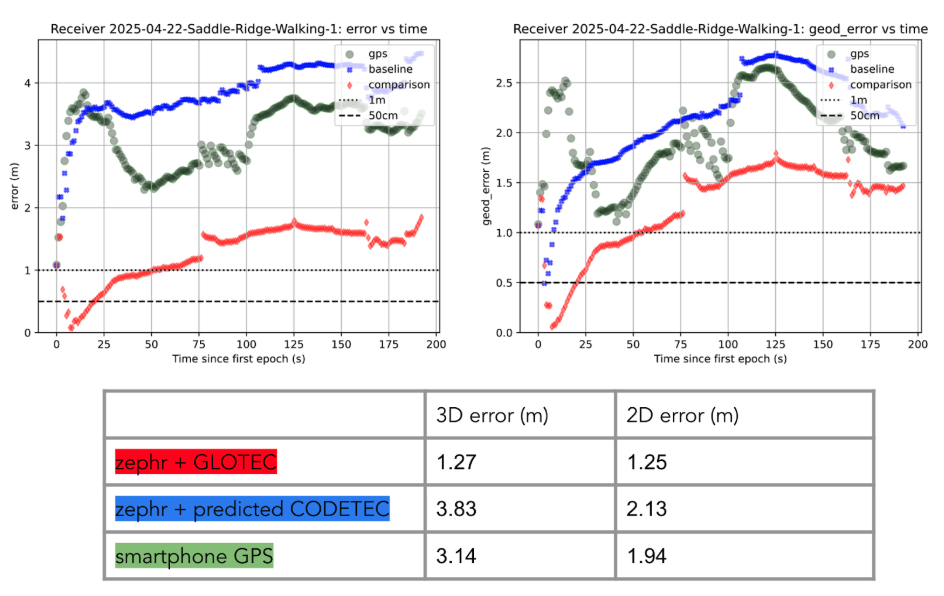
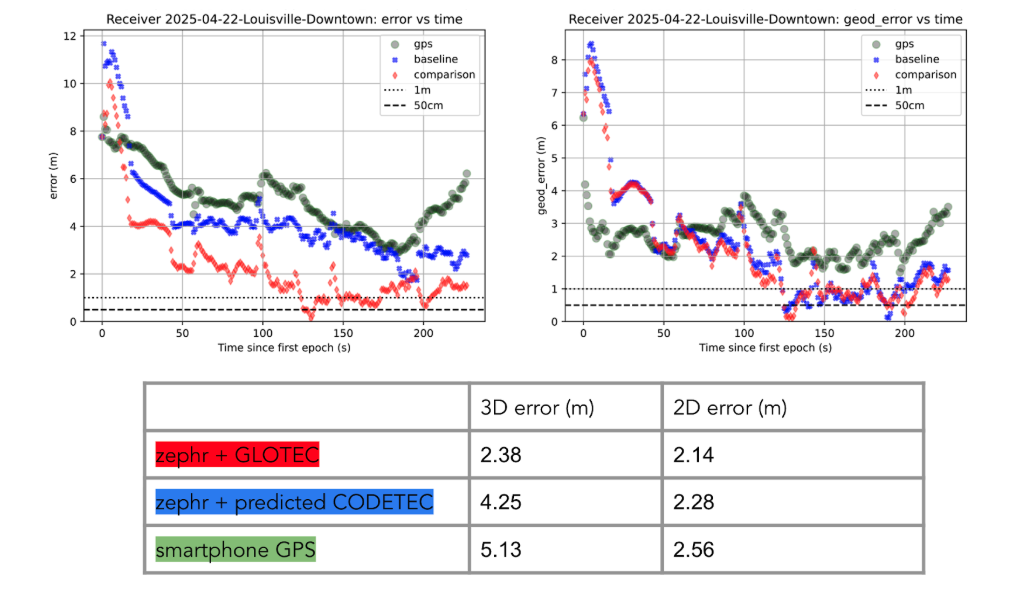
We can break down these results using detailed graphs for each scenario as examples. This will provide a more in-depth look at the positioning for specific traces through the outlined scenarios in Figure 2, Figure 3 and Figure 4:
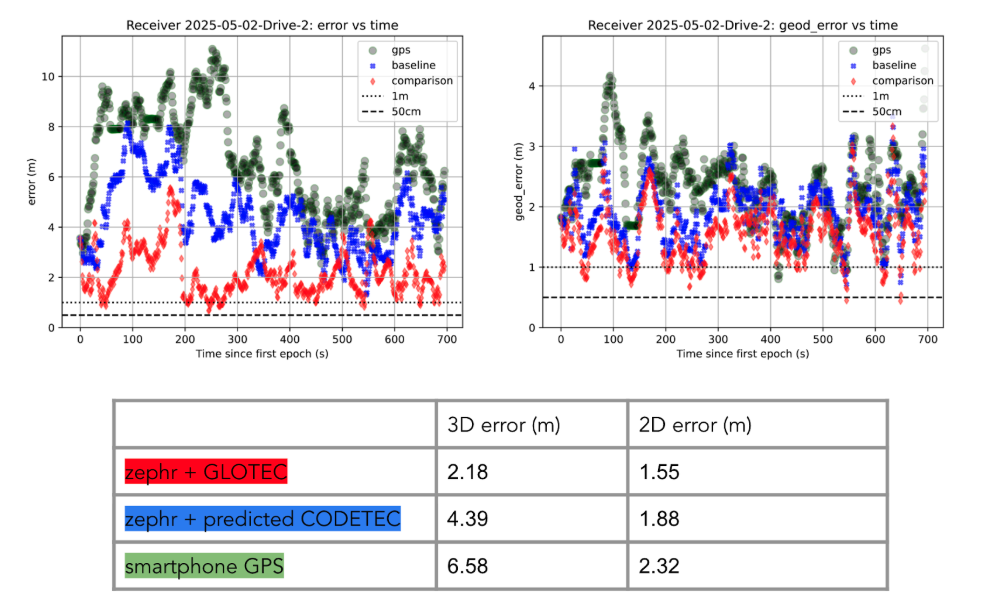
Across all categories, the GloTEC-based regional fitting approach significantly outperformed both the default GNSS solution (which uses broadcast data plus a Klobuchar mode) and the competing IGS products. Accuracy improved by up to 69% in driving scenarios and 46% in walking scenarios, compared to standard smartphone GPS.
While the Pixel 8 used in testing supports dual-frequency GNSS, smartphones face several practical limitations that hinder effective use of ionosphere-free dual-frequency combinations. These include limited signal availability (due to antenna constraints, L1/L5 support gaps, and partial constellation coverage), elevated multipath and noise (especially from omnidirectional antennas in dynamic conditions), and unstable clock biases that complicate error modeling. In fact, iono-free combinations can amplify multipath effects, potentially degrading accuracy in some conditions.
Despite these constraints, the results show that meaningful improvements in positioning are possible using a software-based approach with publicly available corrections. GloTEC, when paired with cooperative or cloud-based GNSS engines, offers a substantial step forward without requiring expensive commercial correction services or specialized hardware.
Broader Implications and Next Steps
While these results are promising, several challenges remain before GloTEC-based corrections can be broadly deployed:
- Connectivity Requirements: Real-time access to GloTEC requires periodic downloads over cellular or Wi-Fi connections, raising questions about reliability in low-bandwidth or disconnected environments.
- Global Calibration: The accuracy of regional fitting depends on local coverage density and VTEC variability. Further tuning may be needed in equatorial or polar regions, where ionospheric behavior is more volatile.
Nevertheless, the availability of GloTEC marks a significant milestone. For the first time, a free, real-time, high-resolution ionospheric correction product is accessible to developers, researchers, and engineers seeking to improve GNSS accuracy at scale. NOAA SWPC has plans to integrate more low-latency space-based and ground-based data into GloTEC in the near future. The new version of the model outputs will be released to the public once the results are validated. As techniques for applying it to mobile and IoT devices mature, the GNSS community may see a broad shift toward more precise, resilient, and cost-effective positioning systems.
GloTEC may have been designed to help forecasters monitor the response of the ionosphere due to space weather events, but its potential to provide an advanced tool for positioning on Earth is just beginning to be understood. In a world where nearly every mobile application depends on location, and where the cost of poor accuracy is rising (from package delivery failures to navigation errors), this kind of public infrastructure is invaluable.
Researchers and industry developers alike should explore how this NOAA capability can be integrated into their positioning systems. If properly supported, GloTEC could become one of the most impactful GNSS innovations of the decade.