Listen to this content
A report published in the April 7 edition of Satellite Navigation (DOI: 10.1186/s43020-025-00162-z) concludes that hybrid approaches are the most reliable solution for UAV navigation. The comprehensive review, by a research team from Prince Sultan University, evaluated 132 papers on UAV navigation in GPS-denied environments.
The research team focused on absolute and relative localization techniques including vision-based systems, lidar and terrain-aided algorithms. The review examined two primary methods for UAV navigation in GPS-denied areas:
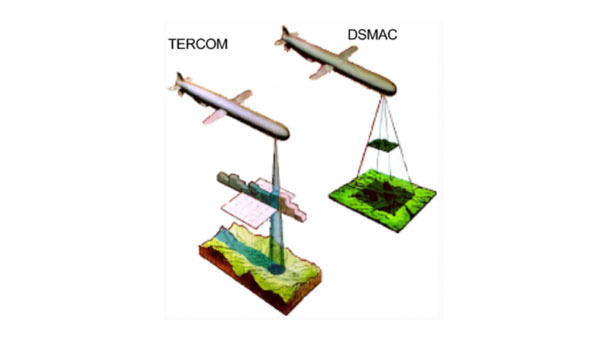
- absolute localization, which uses pre-mapped terrain data (such as TERCOM and DSMAC)
- relative localization methods such as SLAM (simultaneous localization and mapping) and visual-inertial odometry that relies on real-time sensor data.
While absolute methods face limitations in featureless environments, relative techniques offer adaptability but require significant computational resources. Vision-based systems, particularly when enhanced with AI for feature recognition, hold considerable promise, though lighting conditions remain a challenge, the report concludes.
The research emphasizes the importance of sensor fusion, demonstrating that combining lidar, radar and inertial measurements – alongside advanced filtering techniques such as Kalman filters – can substantially improve navigation reliability.
Furthermore, real-time processing is crucial, with hardware accelerators like GPUs and optimized algorithms, such as LSTM networks, enabling faster data analysis and decision-making.
While hybrid systems combining terrain maps with live SLAM data offer a balance of accuracy and flexibility, the study acknowledges the need for further refinement to scale these solutions across various environments. Advancements in AI processing power and edge computing will be key to fully autonomous UAV operations in unpredictable real-world conditions.
“No single sensor or algorithm can solve all the challenges of GPS-denied navigation,” said Imen Jarraya, lead author of the study. “Our research shows that combining absolute and relative localization with multi-sensor fusion is the key to achieving reliable UAV navigation. Future work must focus on optimizing these systems to handle the unpredictability of environments ranging from dense urban areas to remote disaster zones.”
This research holds implications for industries relying on UAVs, such as logistics, agriculture, and defense, Jarraya explained. UAVs delivering medical supplies to remote or disaster-stricken areas could operate without GPS, and military drones could navigate in signal-jammed regions.
The study also points to the need for regulatory frameworks to standardize these technologies, ensuring their safe and efficient integration into future infrastructures. As UAVs become integral to smart cities and infrastructure inspection, overcoming the limitations of GPS will ensure safer, more effective operations. These findings encourage further investment in AI-driven navigation and collaborative research to refine these systems for global use.