Listen to this content
Researchers from Finland, Switzerland, Spain and Romania gathered at Tampere University in Finland for a workshop this month within the Robosat project focusing on localization of autonomous machines.
Workshop participants discussed and demonstrated novel technical solutions to improve localization, particularly of autonomous machines operating in challenging and unconstrained environments, such as forests and mountainous regions.
The Robosat project aims to change how autonomous robots navigate in the wild by integrating multi-sensor and multi-GIS data. During the Tampere workshop, partners from Tampere University (Finland), ETH Zürich (Switzerland), Universitat de València (Spain) and CITST (Romania) discussed strategies for sharing data, identifying relevant GIS and GNSS datasets, and leveraging AI for autonomous labeling of large-scale data.
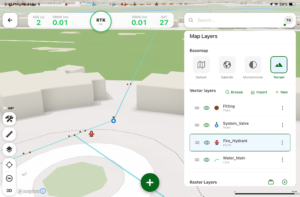
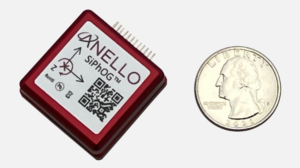
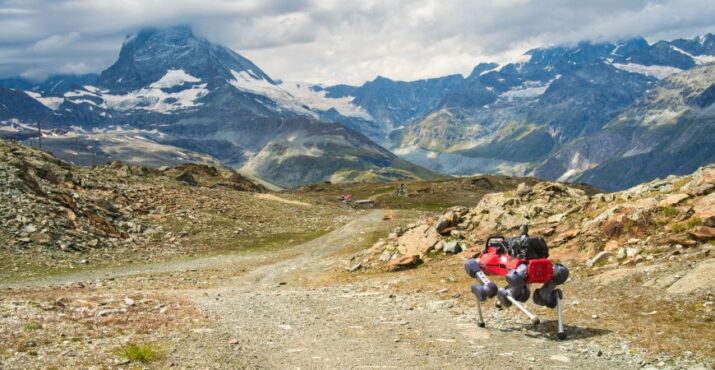
Key topics included the integration of multi-sensor and multi-GIS data to enhance positioning accuracy, planning piloting tests with ETH’s ANYmal robot and TAU’s new I/Q GNSS grabber device, and discussing methods for AI-driven data labeling for massive datasets collected during field trials.
The Tampere University project team includes Elena Simona Lohan and Jari Nurmi as supervisors and Ph.D. students Yelyzaveta Pervysheva and Muhammad Safi.
The Robosat efforts supports applications in robotics, environmental monitoring, and industrial automation. By combining expertise across Europe, Robosat intends to pave the way for smarter, safer and more efficient autonomous systems.
It also aims to provide new open-access rich datasets to the research community. A first dataset enabling multimodal classification studies has already been published on Zenodo as a collaborative work between Tampere University and CITST teams.
The Robosat project
Autonomous robot navigation in the wild using satellite-based 3D geographical information (ROBOSAT) aims to provide a scalable MultiGIS high-quality data collection platform through the use of a quadrupedal robot that can autonomously perform long-distance missions in challenging environments, such as Alpes mountains or Finnish forests.
Consortium organizations are comprised of three universities and one SME:
- Tampere University, Finland. Expertise: GNSS, wireless positioning, sensing, and communications, RF Fingerprinting and interference mitigation. Coordinator: Elena Simona Lohan
- ETH, Switzerland. Expertise: automation, mapping, control theory, and legged-robot research. PI: Marco Hutter
- Universitat de Valencia, Spain. Expertise: computer science, database management, machine learning. PI: Joaquin Torres Sospedra
- CITST, Romania. Expertise: machine learning/artificial intelligence, robotics, exploitation. PI: Irina Mocanu.