Listen to this content
Tersus GNSS has launched the MVP S1 RTK-SLAM handheld 3D laser scanner for mobile mapping and reality capture. The MVP S1 uses GNSS through an AI-driven RTK-SLAM workflow, as well as lidar data with imagery from dual 48-megapixel panoramic cameras.
The combination provides survey-grade results in both GNSS-denied and open environments. The system achieves centimeter-level accuracy outdoors and maintains performance indoors or underground through SLAM processing.
TimeSync 3.0 synchronizes the hardware, aligning sensor data at the microsecond level and supporting consistent datasets and reliable post-processing.
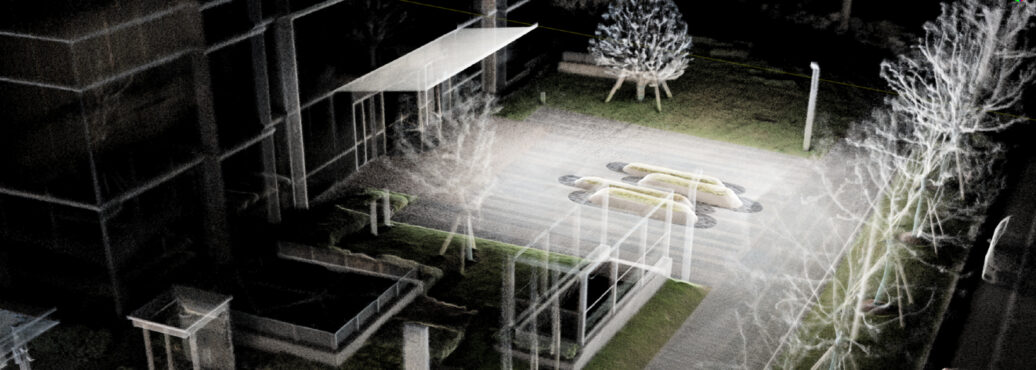
A mobile application provides users with real-time feedback, including previews of colorized point clouds while scanning, as well as basic scan reports on site. This feature helps operators verify data completeness and quality before leaving the field, reducing the need for repeat visits.
The MVP S1 supports 3D gaussian splatting (3DGS), enabling creation of textured, photorealistic 3D models. This capability is useful for building information modeling, construction progress monitoring, underground surveys, forestry analysis and industrial site documentation.